latest news:
a consortium is under creation
VEHICLE STEERING SYSTEM
WITH
ELEUTHERO-STROPHE
There is a patented Mechanism, named "ELEUTHERO" ("ELEUTHERO-STROPHE", that means an independently rotating hub, is the proposed full name for this brand new Mechanism) for the convenience of this presentation, referring to a configuration which transmits endless rotation from a shaft onto a stationary frame to a shaft onto an endlessly rotating carrier, or vice versa, PURELY MECHANICALLY and INDEPENDENTLY (KINEMATICALLY and DYNAMICALLY) of the rotation of the carrier, inserting THREE only additional moving parts between its input and its output.
MORE FOR THE ELEUTHERO MECHANISM AT GREEN ENGINE PROJECT
MORE FOR THE ELEUTHERO MECHANISM AT WIPO
MORE FOR THE ELEUTHERO MECHANISM AT WIPO
A very important application, also, of this Mechanism is to a steering bracket which carries the drive wheel of a vehicle, where this steering bracket is supported on the chassis of the vehicle and rotates about an axis preferably perpendicular to the axis of rotation of the wheel, for the purpose of steering the vehicle, so the transmission of power from the chassis to the endlessly rotating drive wheel of this vehicle is achieved, independently of the rotation of the steering bracket with respect to the frame of the vehicle; this steering rotation is usually finite, while, thanks to this configuration, can be also endless, rendering in this way the vehicle really holonomic.
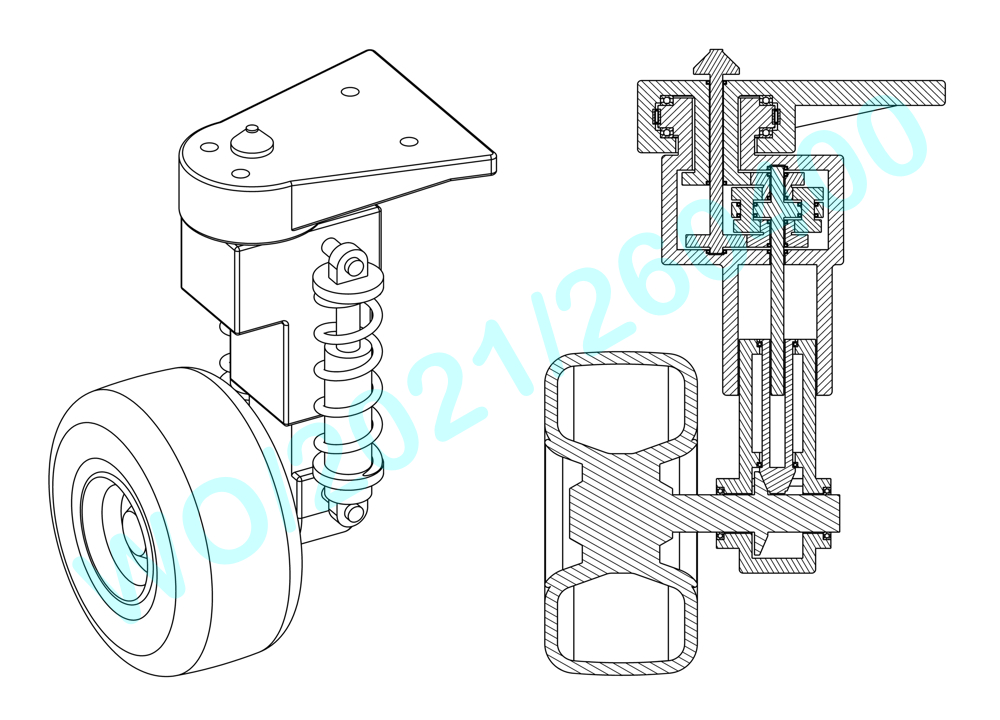
The output of this specific application of the Mechanism can be connected to a coaxial splined shaft (see the drawing below), thus constituting a telescopic transmission shaft of variable length, within a steering bracket frame of variable length as well, giving in this way one more degree of freedom to the wheel, while, with similar mechanical engineering tricks, the wheel gains all the necessary degrees of freedom, so that this specific application of the Mechanism can supersede the ball-bearing constant velocity joint in many applications, at least.
The introduction of such a Mechanism moreover allows:
- the designing of an all-wheel drive and all-wheel steering vehicle, a really holonomic one, as the steering brackets can be rotated, for steering, in an absolutely endless way,
- the designing, also, of a vehicle with extremely high clearance from the ground, for special use -for fire-fighting in rugged and jungly terrain, for instance- as the height of each steering bracket unit can be as great as it is required,
- the achievement of the capability of transmitting of a huge amount of power via WHEELS WHICH THRUST AND STEER THE VEHICLE AT THE SAME TIME, even in a classic front-wheel drive car, with a normal steering angle amplitude, because this transmission is performed VIA ROBUST GEARS INSTEAD OF THE DELICATE BALLS OF THE BALL-BEARING CONSTANT VELOCITY JOINT, a fact that can render this specific application of the Mechanism the new and promising proposal for the propulsion of a vehicle of any type, especially a military one or even a supercar.
In close collaboration with the National Technical University of Athens, a Project is running for:
The designing of a fully operational Prototype, a vehicle with two steering brackets being kinematically connected via a classic Ackermann linkage, with an almost normal steering angle amplitude, simply increased to more than 80 degrees, where power is transmitted from a driving shaft, onto the frame of the vehicle, to the shaft of the drive wheel, onto the rotating steering bracket, independently of the rotation of the steering bracket with respect to the frame of the vehicle, for each steering bracket.
Besides, several specific ideas will be applied and tested, in order to give to the wheel ALL the necessary degrees of freedom, with the final goal TO BRING TO THE MARKET A NEW PRODUCT which will have only advantages comparing to the ball-bearing constant velocity joint, in a competitive also cost of construction for a medium level mass production.


An 8x8x8 military vehicle, which can be a more classic 8X4X4 or of any other configuration :

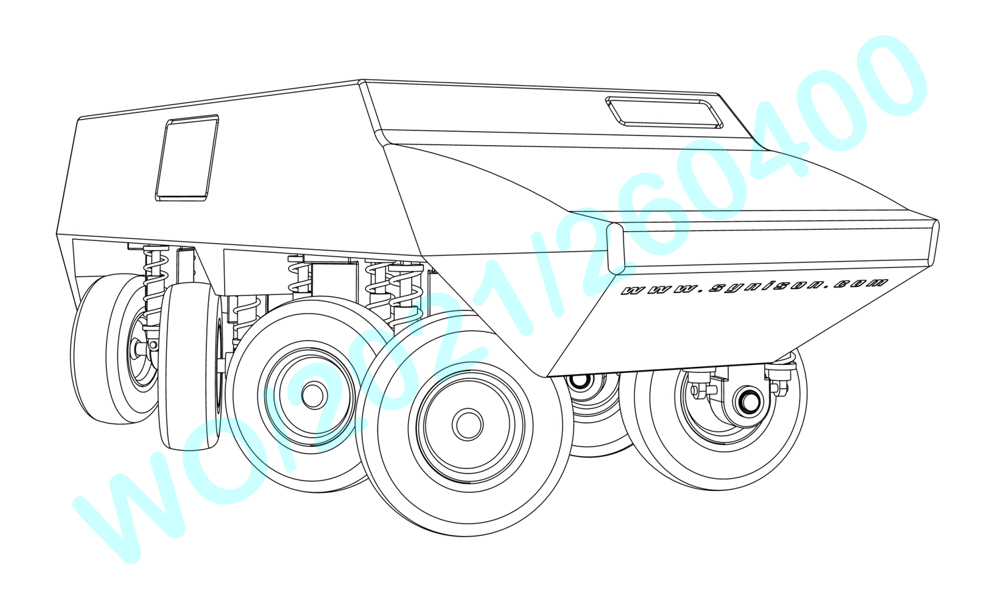
A 6x6x6 extreme SUV or a fire-fighting vehicle or a tractor with a very high ground clearance:



A simple 4x2x2 family or smaller car with a normal steering angle amplitude:
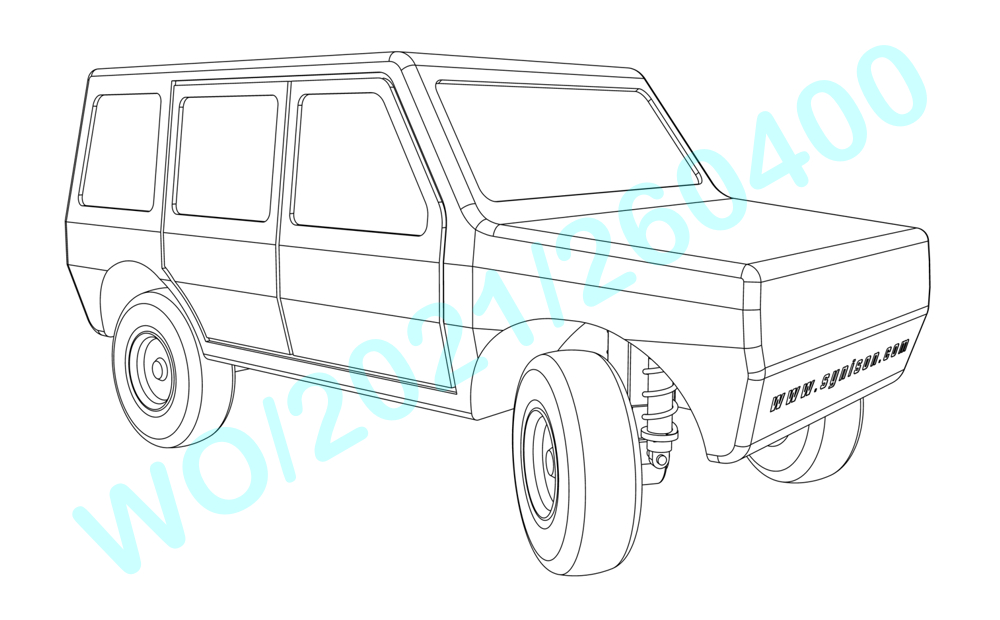
A simple 4x2x2 family or smaller car with an extraordinary steering angle amplitude:

While manufacturers and users of ATVs will adore this new way of "PROPEL-and-STEER"!

M O R E (complete description, drawings, claims etc) as PDF
M O R E (complete description, drawings, claims etc) at WIPO






The output of this specific application of the Mechanism can be connected to a coaxial splined shaft (see the drawing below), thus constituting a telescopic transmission shaft of variable length, within a steering bracket frame of variable length as well, giving in this way one more degree of freedom to the wheel, while, with similar mechanical engineering tricks, the wheel gains all the necessary degrees of freedom, so that this specific application of the Mechanism can supersede the ball-bearing constant velocity joint in many applications, at least.
The introduction of such a Mechanism moreover allows:
- the designing of an all-wheel drive and all-wheel steering vehicle, a really holonomic one, as the steering brackets can be rotated, for steering, in an absolutely endless way,
- the designing, also, of a vehicle with extremely high clearance from the ground, for special use -for fire-fighting in rugged and jungly terrain, for instance- as the height of each steering bracket unit can be as great as it is required,
- the achievement of the capability of transmitting of a huge amount of power via WHEELS WHICH THRUST AND STEER THE VEHICLE AT THE SAME TIME, even in a classic front-wheel drive car, with a normal steering angle amplitude, because this transmission is performed VIA ROBUST GEARS INSTEAD OF THE DELICATE BALLS OF THE BALL-BEARING CONSTANT VELOCITY JOINT, a fact that can render this specific application of the Mechanism the new and promising proposal for the propulsion of a vehicle of any type, especially a military one or even a supercar.
In close collaboration with the National Technical University of Athens, a Project is running for:
The designing of a fully operational Prototype, a vehicle with two steering brackets being kinematically connected via a classic Ackermann linkage, with an almost normal steering angle amplitude, simply increased to more than 80 degrees, where power is transmitted from a driving shaft, onto the frame of the vehicle, to the shaft of the drive wheel, onto the rotating steering bracket, independently of the rotation of the steering bracket with respect to the frame of the vehicle, for each steering bracket.
Besides, several specific ideas will be applied and tested, in order to give to the wheel ALL the necessary degrees of freedom, with the final goal TO BRING TO THE MARKET A NEW PRODUCT which will have only advantages comparing to the ball-bearing constant velocity joint, in a competitive also cost of construction for a medium level mass production.
An 8x8x8 military vehicle, which can be a more classic 8X4X4 or of any other configuration :
A 6x6x6 extreme SUV or a fire-fighting vehicle or a tractor with a very high ground clearance:
A simple 4x2x2 family or smaller car with a normal steering angle amplitude:
A simple 4x2x2 family or smaller car with an extraordinary steering angle amplitude:
While manufacturers and users of ATVs will adore this new way of "PROPEL-and-STEER"!
M O R E (complete description, drawings, claims etc) as PDF
M O R E (complete description, drawings, claims etc) at WIPO